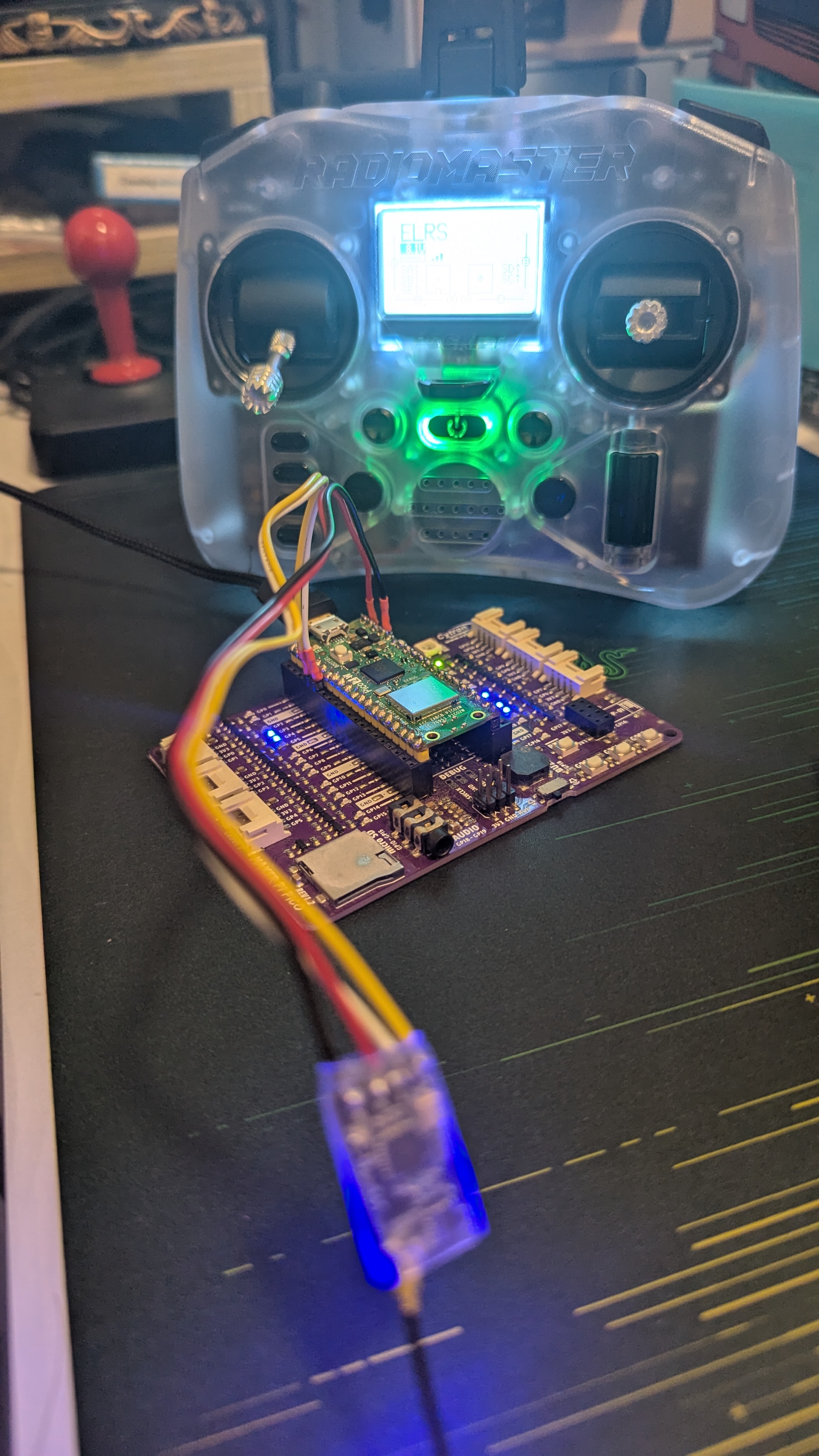
Here are some screenshots showing the CRSF driver in action:
A pure-Python port of the AlfredoCRSF C++ library tailored for RP2040-based boards running MicroPython or CircuitPython. The driver speaks the Team BlackSheep Crossfire (CRSF) protocol over UART and mirrors the behaviour of the original implementation while staying friendly to both firmware families.
- 420 kbaud CRSF RX/TX handling via
machine.UART(MicroPython) orbusio.UART(CircuitPython) - RC channel decoding for 16 packed 11‑bit channels
- Link statistics parsing (RSSI, link quality, SNR, TX power)
- Failsafe monitoring with configurable link-quality and RSSI thresholds
- Battery and custom payload telemetry frame generation
- Callbacks for RC channels, link statistics, and failsafe state changes
- Optional utility to convert CRSF ticks to microseconds (
ticks_to_us)
Copy the lib/crsf package to your board's lib/ directory:
- MicroPython –
mpremote fs cp -r lib/crsf :lib/ - CircuitPython – mount the
CIRCUITPYUSB drive and copy thelib/crsffolder toCIRCUITPY/lib/(or usecircup/adafruit-ampy).
The module also runs under CPython for development and unit testing.
import board
import busio
from crsf import BAUD_RATE, CRSF, ticks_to_us
uart = busio.UART(
board.GP4,
board.GP5,
baudrate=BAUD_RATE,
timeout=0,
receiver_buffer_size=512,
)
crsf = CRSF(uart)
def on_channels(channels):
print("Channel 1 (µs)", ticks_to_us(channels[0]))
def on_link(stats):
print("RSSI:", stats.rssi, "dBm", "LQ:", stats.link_quality, "%")
def on_failsafe(state):
if state:
print("Failsafe engaged")
crsf.set_on_rc_channels(on_channels)
crsf.set_on_link_statistics(on_link)
crsf.set_on_failsafe(on_failsafe)
while True:
crsf.process_frames()Tip: On MicroPython you can continue using
machine.UART—theCRSFclass automatically adapts, so only the UART construction changes.
from machine import Pin, UART
from crsf import BAUD_RATE, CRSF
uart = UART(1, baudrate=BAUD_RATE, tx=Pin(4), rx=Pin(5))
crsf = CRSF(uart)
## Telemetry helpers
```python
# Battery telemetry (values follow the CRSF specification)
crsf.telem_set_battery_data(
voltage=1150, # decivolts
current=320, # deciamps
capacity=1650, # mAh
percent=82,
)
# Send a custom frame (≤60 bytes)
crsf.telem_set_custom_payload(b"FW:v1.2.3")
# Telemetry frames are sent the next time process_frames() runs
The repository includes CPython unit tests that exercise the driver logic with a stub UART. Run the suite with:
python -m unittest discover -s testsThis emulates the protocol behaviour without hardware so you can iterate quickly before deploying to a Pico.